









































E-journal for electrical and electronic engineers
AUTOMATYKA, ELEKTRYKA, ZAKLOCENIA
(AUTOMATICS, ELECTROTECHNICS, DISTURBANCES)
Vol. 1, Nr 2 (2) 2010
Fastinating featu res of PID controlller
Abstract
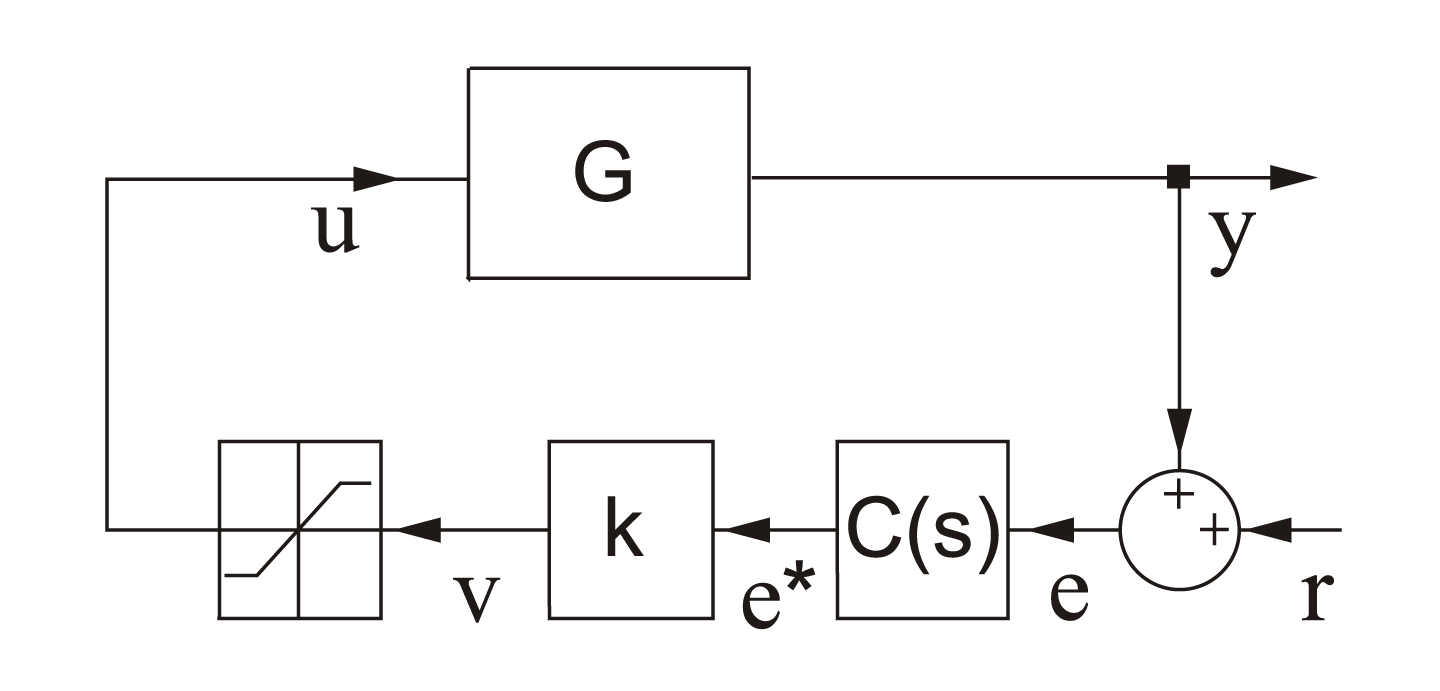
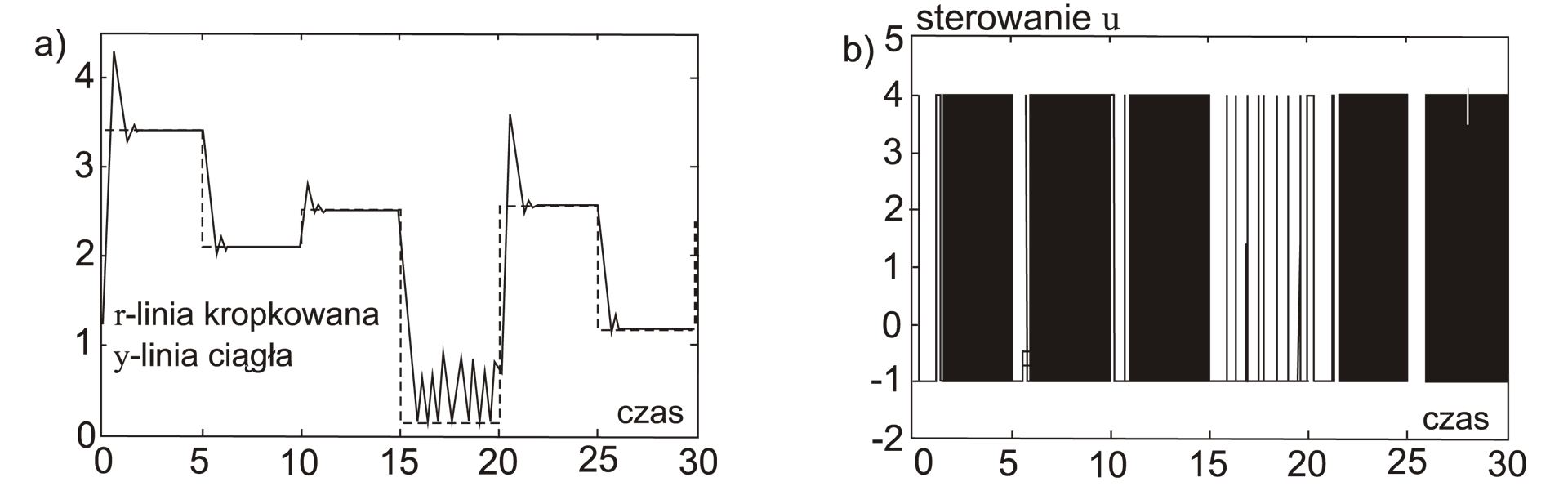
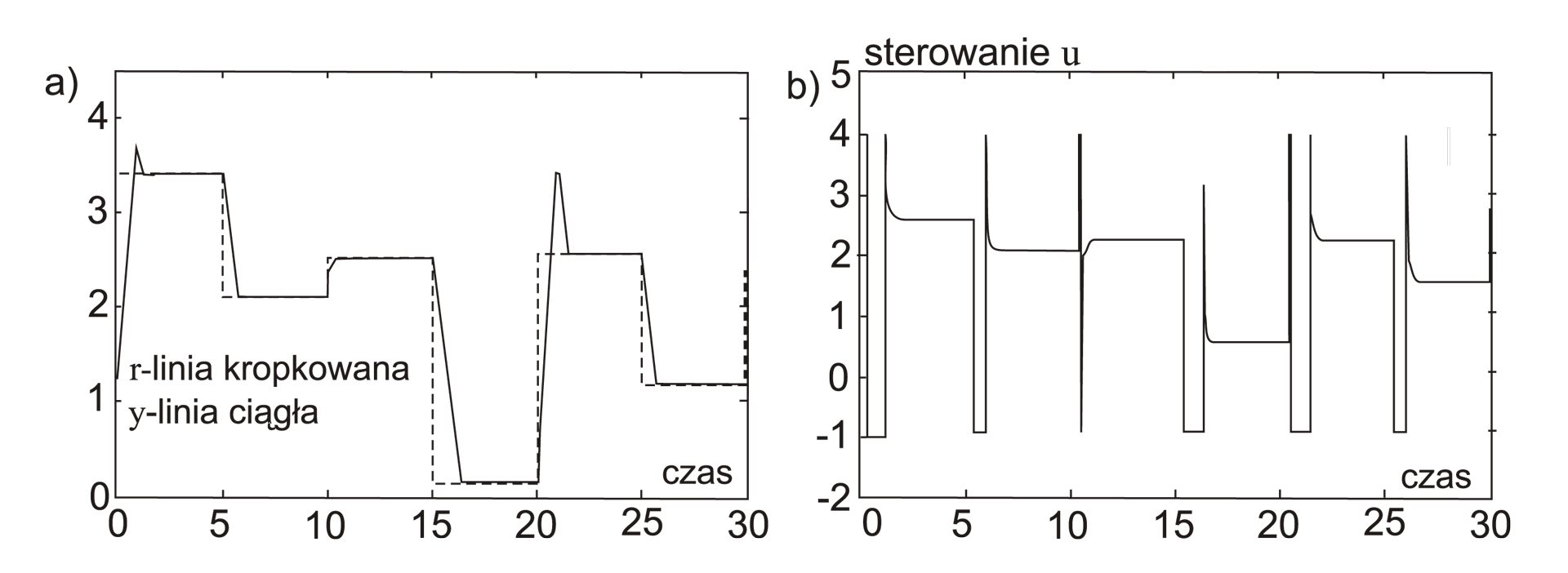
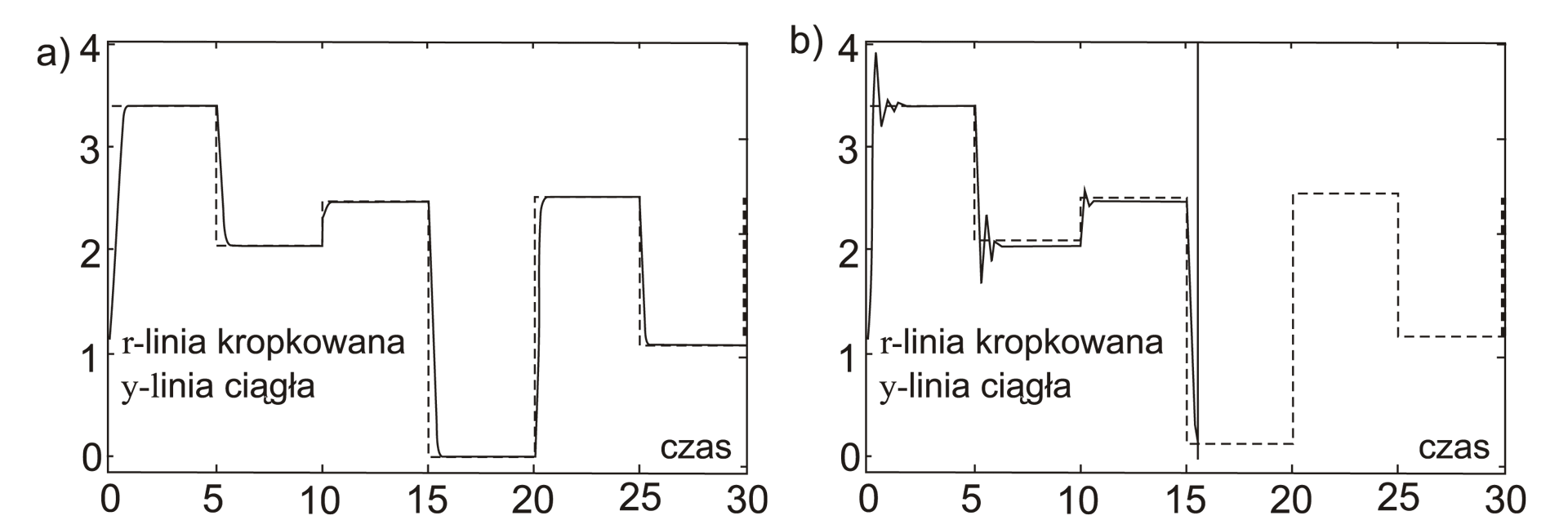
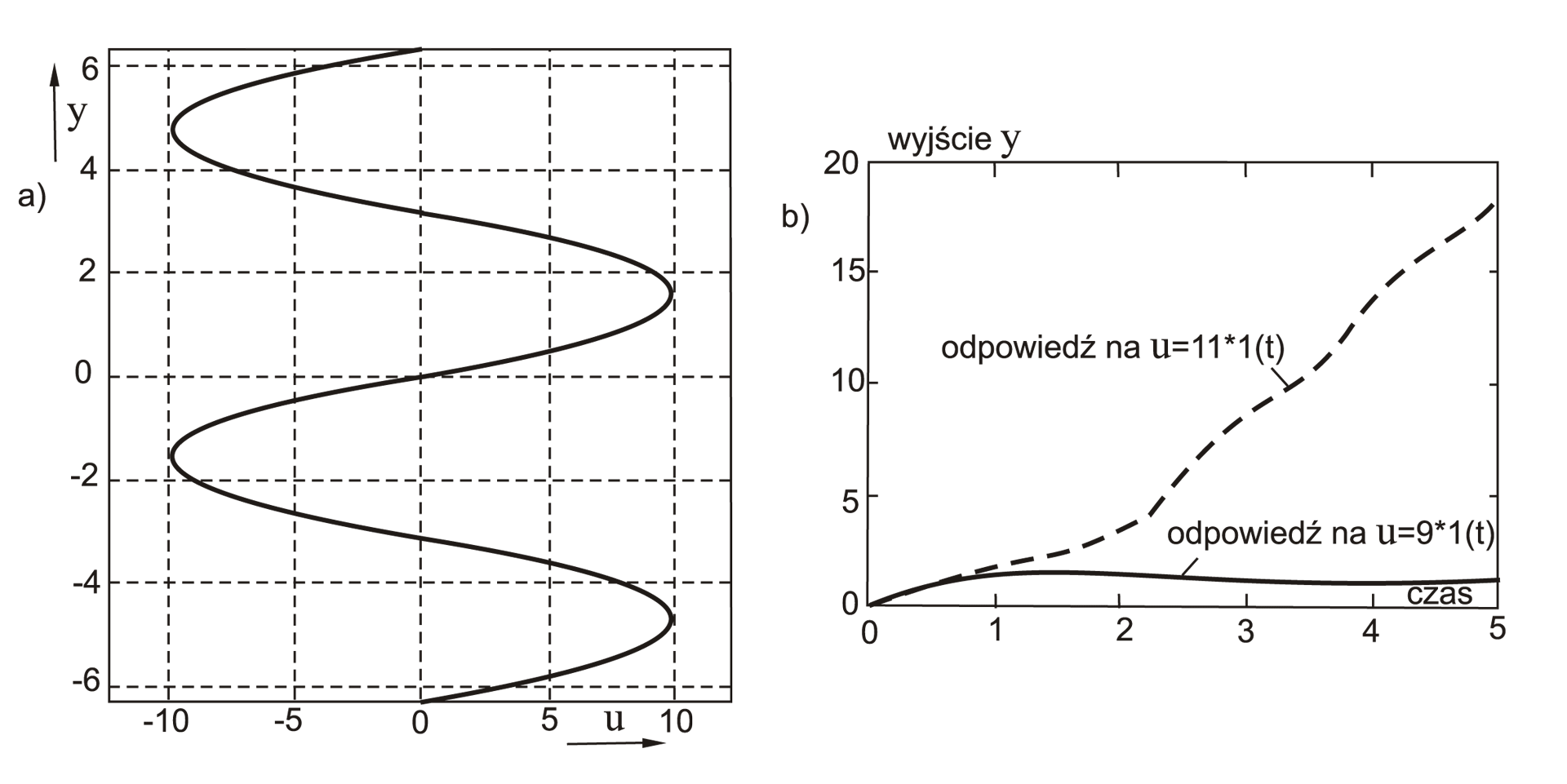
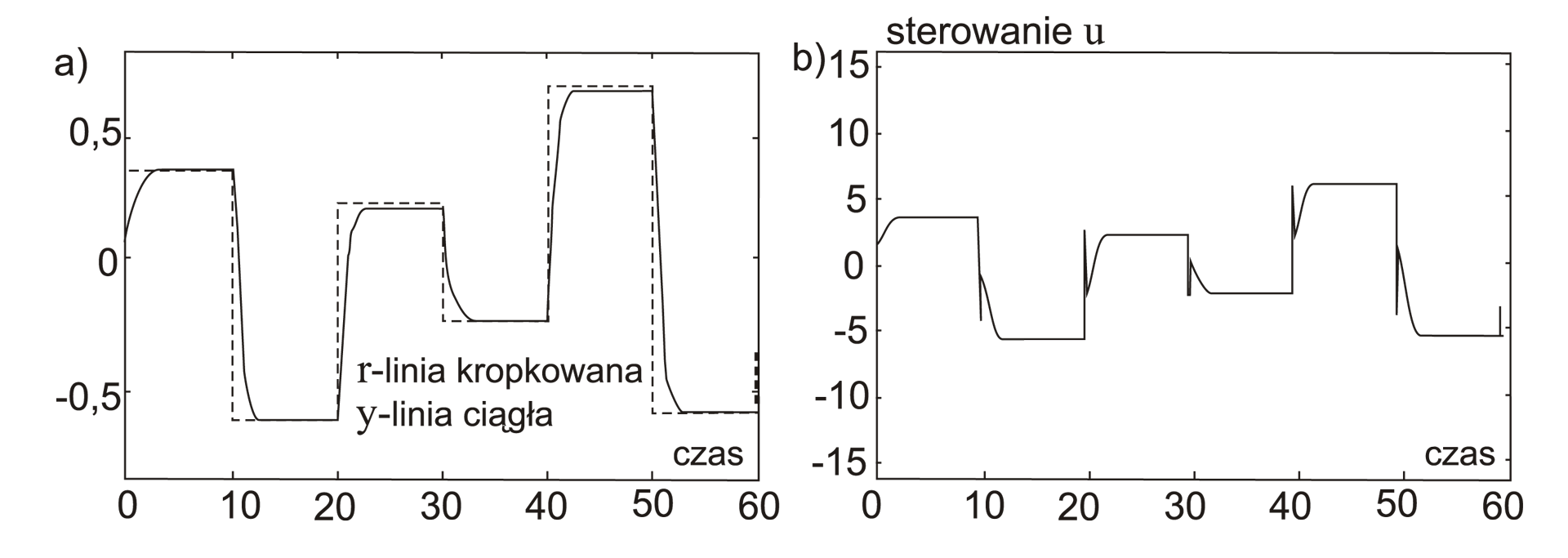
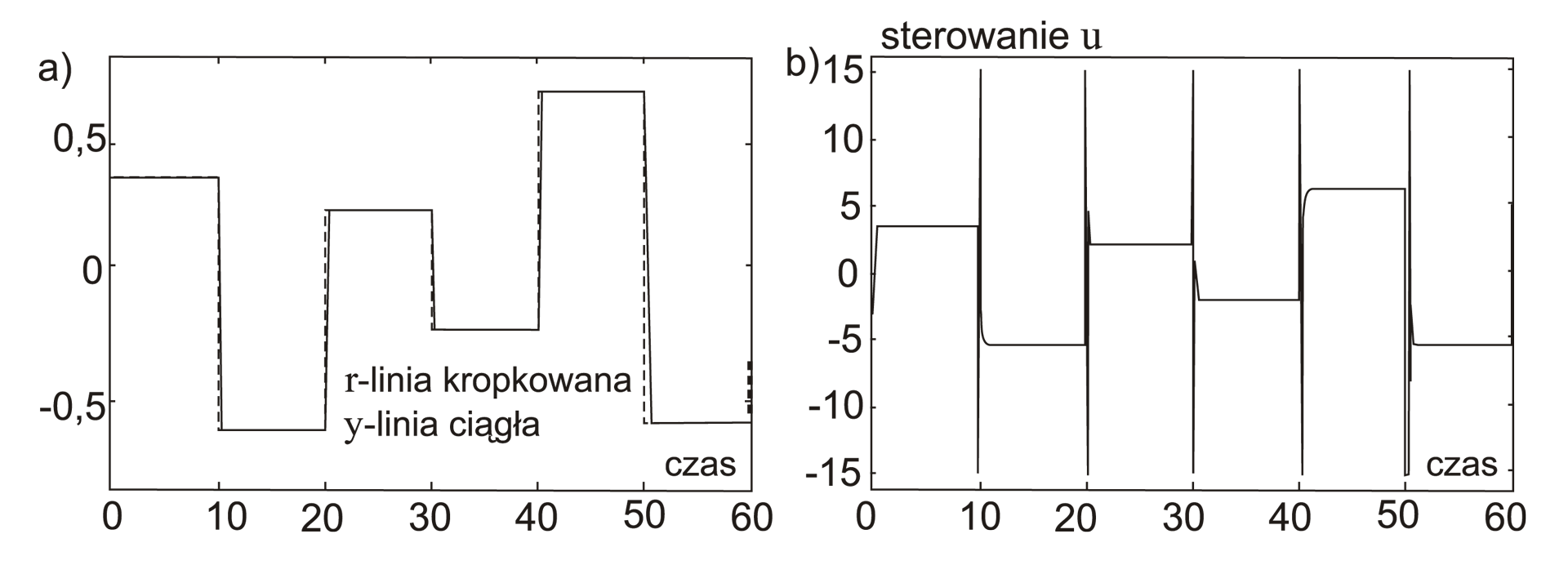
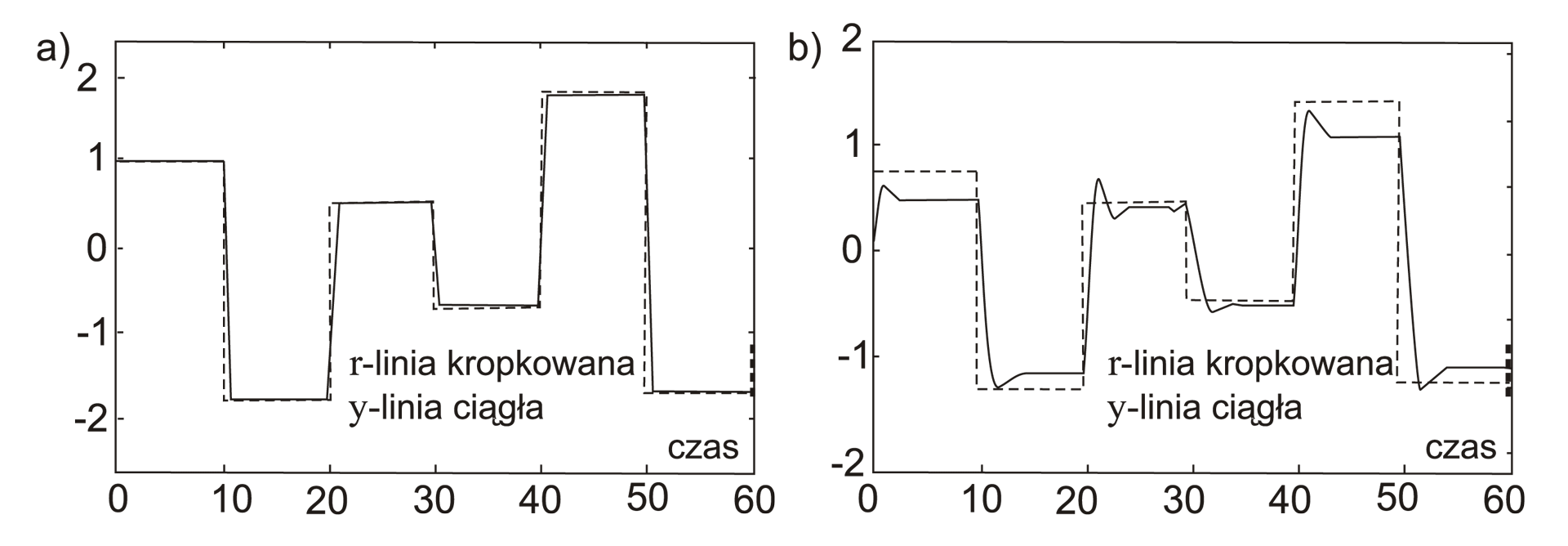
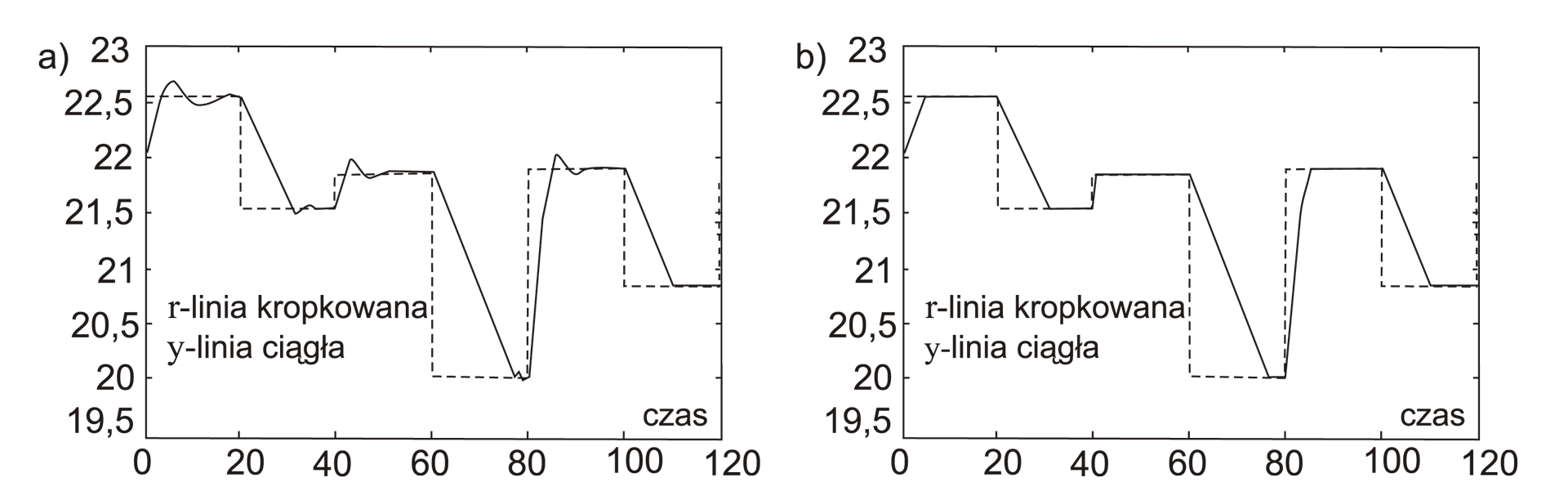
The paper presents the basic principle of control for systems with feedback and objects with the minimum-phase zeros, or without. It is shown that simple controllers designed according to this principle, applied to the highly non-linear objects in demonstration programs of MATLAB contained in Neural Network Toolbox, are much better than those programs with the neural controllers. It has been demonstrated that the regulators designed according to the basic principle of control fare well for much greater changes in the set point without the need for retuning.
Keywords
the basic principle of control, neural predictive control, neural control with the reference model
Fig.
Bilbiography
http://epismo-aez.pl/fascynujce-wasnoci-ukadow-z-regulatorami-wynikajcymi-z-podstawowej-zasady-sterowania-bibliografia.php